
Here’s an interesting comment from MIT’s Alfonso Parra Rubio, “Treating soft versus hard robotics is a false dichotomy.” For, I suppose, obvious reasons, thinking around technology tends to be a bit…binary. Certainly we’ve traditionally regarded soft robots as being something that exists in direct opposition to their more traditional counterparts.
But the organic beings that inspire them are often some combination of rigid and soft. After all, what are we if not a bunch of soft tissue bound to a rigid skeletal structure. It follows, then, that roboticists would do well to marry the two, in order to harness the best of both worlds.
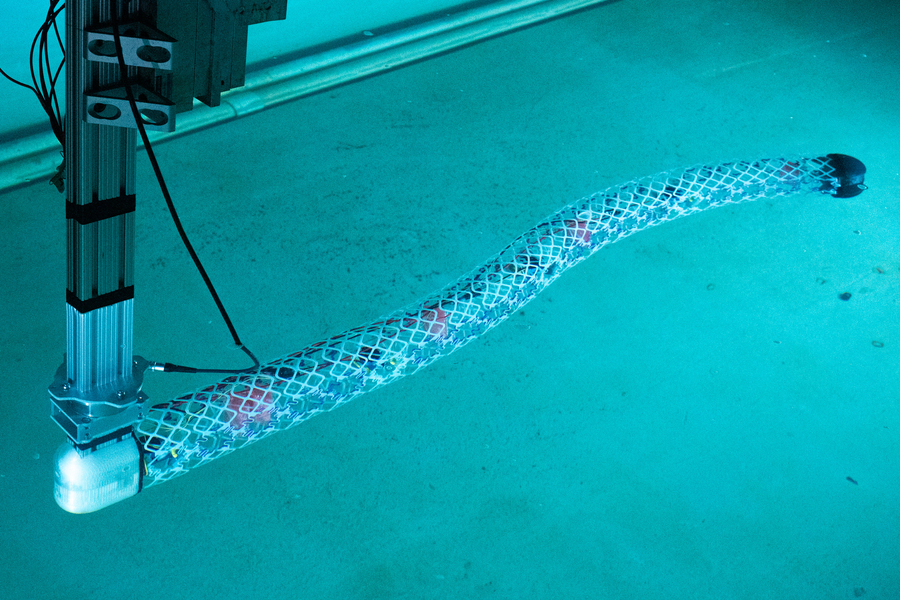
Image Credits: MIT
This is one of the guiding principles behind MIT’s recent rethink of its underwater, snakelike aquabots. The robot is largely hollow, built of modular voxels that can be assembled to create systems that are rigid in certain directions and soft in others, combing stiff and flexible elements.
“Smooth flexibility of the body surface allows us to implement flow control that can reduce drag and improve propulsive efficiency, resulting in substantial fuel saving,” says MIT professor Michael Triantafyllou, who was previously involved in MIT’s RoboTuna project.
Thus far, the system has been configured into the kind of meter-long eel design seen in this post, but the modular building blocks mean it’s possible to create a variety of different shapes and scale up the robot’s size considerably.
“There have been many snake-like robots before,” adds fellow MIT professor, Neil Gershenfeld. “But they’re generally made of bespoke components, as opposed to these simple building blocks that are scalable.”
Modularity also potentially means dramatically cutting down the assembly time required to build these robots. The 60 pieces in this system were assembled in two days, rather than the two years that went into building RoboTuna.
Modular eel robots combine soft and rigid components by Brian Heater originally published on TechCrunch





{kind=link}